Inicio Unidad I Unidad II Unidad III Unidad IV Unidad V Bibliografía
Características de operación de los CDA.
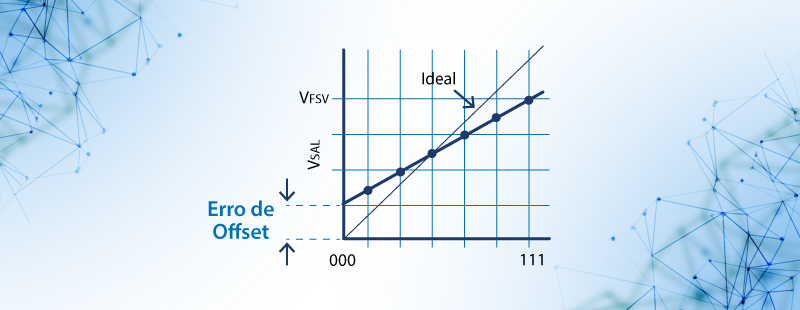
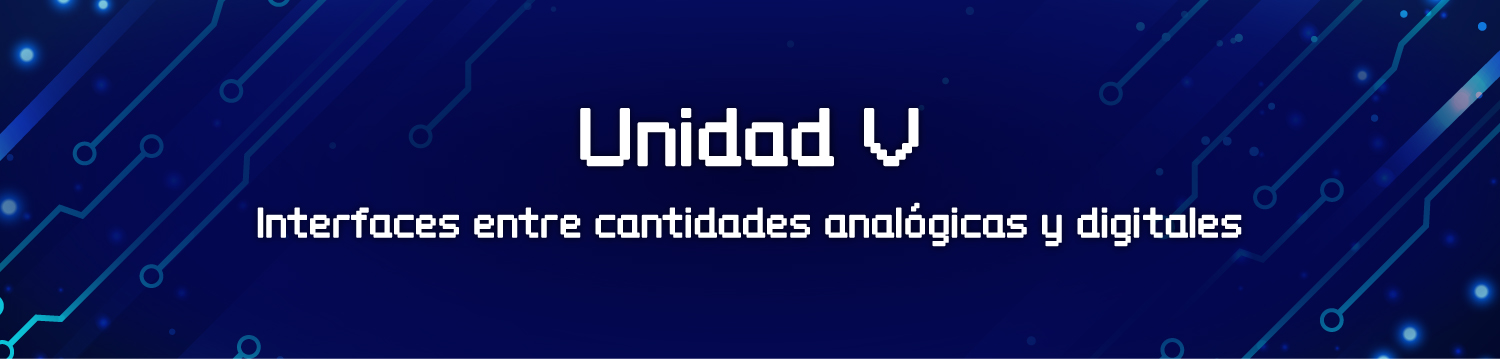
Figura 96. Error de offset
Precisión
La precisión absoluta de un convertidor se define como la diferencia entre la salida esperada y la real. Esta precisión incluye los errores de offset, ganancia, y linealidad.
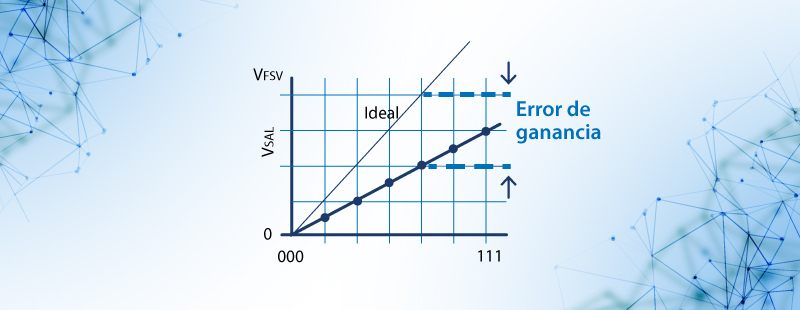
Figura 97. Error de ganancia
No linealidad integral (INL) o mínimos cuadrados.
Máxima desviación entre la característica de transferencia real e ideal. Después de que el error de offset y el de ganancia han sido eliminados el error de no linealidad integral se define como la desviación de la línea recta que presenta la característica de transferencia. Sin embargo se presenta un problema, ¿qué línea se elige como referencia?.
Una elección conservadora sería usar aquella línea recta que une los puntos terminales de la característica de transferencia. Otra posibilidad sería utilizar aquella recta que reduce los errores cuadráticos medios respecto de la característica real.
Máxima desviación (respecto al ideal) del incremento de Vo entre códigos adyacentes.
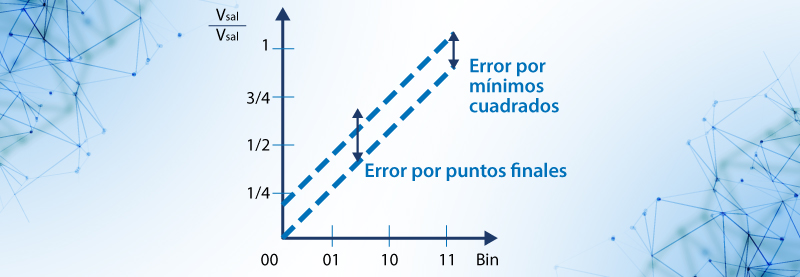
Figura 98. Error por no linealidad integral ó mínimos cuadrados
Monotonicidad:
Propiedad según la cual la salida aumenta al incrementar el valor binario del código de entrada.
Un convertidor D/A monótono es aquel cuya salida siempre se incrementa según aumenta el valor de la entrada. Es decir, la pendiente de la característica de transferencia del convertidor, es constante.
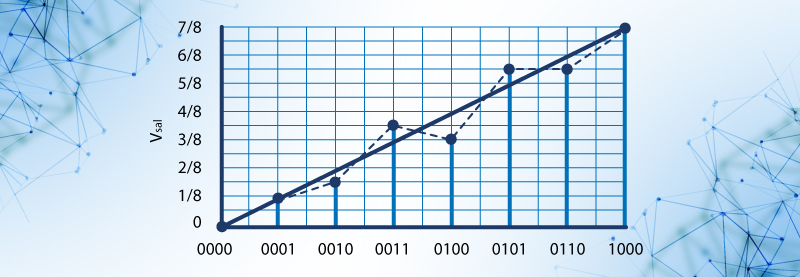
Figura 99. Monotonicidad
Tiempo de conversión y frecuencia de muestreo (D/A)
En un convertidor D/A el tiempo resolución es el tiempo que tarda el convertidor en llevar la salida hasta un valor determinado, generalmente 0.5 LSB . La frecuencia de muestreo es la frecuencia a la cual las muestras pueden ser convertidas continuamente, y es típicamente el inverso del tiempo de resolución.
Dinámicas:
Tiempo de asentamiento:
Tiempo transcurrido desde que se produce un cambio en el código de entrada hasta que la salida alcanza el nivel analógico y se mantiene dentro de una banda de error.
Glitches:
Variaciones indeseadas en la salida debido a la diferente velocidad de conmutación de los interruptores que forman el DAC.
Tipos de circuitos convertidores que existen en el mercado.
En el mercado existe una gran cantidad de circuitos convertidores, los hay de 8 bits, de 10 bits, los más comerciales, entre otros.
Entre otros circuitos comerciales tenemos:
TLC5620C DAC por divisor de tensión, convertidor de digital a analógico 8-bit cuádruples
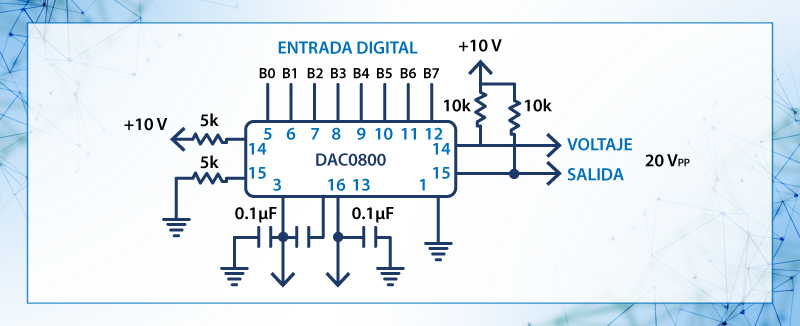
Figura 100. Esquema del convertidor 8OO4
Ejemplo 16.-Se tiene un convertidor digital - analógico de 8 bits y el rango de voltaje de salida de 0 a 5 voltios, ¿Cuál es su resolución?
Solución:
Con n = 8, hay una resolución de 2N = 256 o lo que es o mismo: El voltaje de salida puede tener 256 valores distintos (contando el "0")
También: resolución = VoFS / [ 2n - 1] = 5 / 28-1 = 5 / 255 = 19.6 mV / variación en el bit menos significativo
Ejemplo 17.-Si el CDA es de 4 bit, ¿cuál su resolución respecto al voltaje de referencia?
Solución:
Con n = 4 bits, se consiguen 2n = 16 posibles combinaciones de entradas digitales
La salida analógica correspondiente a cada una de las 16 combinaciones dependerá del voltaje de referencia que estemos usando, que a su vez dependerá del voltaje máximo que es posible tener a la salida analógica.
Si el voltaje máximo es 10 Voltios, entonces el Vref. (Voltaje de referencia) será 10 / 16 = 0.625 Voltios.
Si el voltaje máximo es 7 voltios, Vref = 7 / 16 = 0.4375 Voltios.
Se puede ver que estos voltajes de referencia serán diferentes (menores) si se utiliza un DAC de 8 o más bits. Con el de 8 bits se tienen 256 combinaciones en vez de 16. Esto significa que el voltaje máximo posible se divide en más partes, logrando una mayor exactitud.
Si el Vref = 0.5 Voltios

Tabla 41. Valores de voltaje de salida, con Vref a 0.5 V.
A diferentes tipos de DAC y todos ellos con una salida máxima de 15 voltios, se puede ver que la resolución y exactitud de la salida analógica es mayor cuando más bits tenga. Ver siguiente figura tabla 42
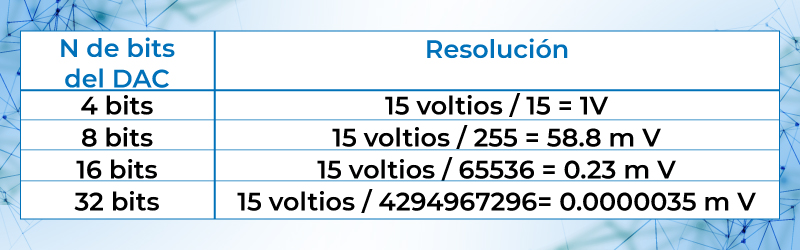
Tabla 42. Resolución de diferentes DAC referidos a 15 V
Características de operación de los CAD
Errores en los convertidores analógico/digital.
Un convertidor no es un circuito perfecto, sino que se presentan una serie de errores que debemos tener en cuenta. Algunos de los que más importancia tienen son los siguientes:
Error de offset:
El error de offset es la diferencia entre el punto nominal de offset (cero) y el punto real de offset. Concretamente, para un convertidor A/D este punto es el punto central de todos aquellos valores de la entrada que nos proporcionan un cero en la salida digital del convertidor. Este error afecta a todos los códigos de salida por igual, y puede ser compensado por un proceso de ajuste.
Error de linealidad (linealidad integral):
Este error es la manifestación de la desviación entre la curva de salida teórica y la real, de modo que para iguales incrementos en la entrada, la salida indica distintos incrementos.
Error de apertura:
Es el error debido a la variación de la señal de entrada mientras se está realizando la conversión. Este error es uno de los más importantes cuando se están muestreando señales alternas de una frecuencia algo elevada, (como por ejemplo el muestreo de voz) pero tiene poca importancia cuando medimos señales cuasi-continuas, como temperatura, presión, o nivel de líquidos. Para minimizar este tipo de error se usan los circuitos de muestreo y retención. Este error es importante, ya que si no lo tenemos en cuenta raramente podemos digitalizar adecuadamente señales alternas.
Si consideramos un error que no afecte a la precisión total de la conversión, ( por lo que habrá de ser menor que ½ LSB) la frecuencia máxima de muestreo deberá ser:
En esta fórmula Ta es el tiempo de apertura del circuito de muestreo y retención, o bien el tiempo total de conversión si el anterior no existe, y n el nº de bits del convertidor.
El circuito de muestreo y retención puede estar a veces integrado dentro de la misma cápsula del convertidor, lo que nos puede simplificar el diseño enormemente.
Error de cuantificación:
Es el error debido a la división en escalones de la señal de entrada, de modo que para una serie de valores de entrada, la salida digital será siempre la misma. Este valor se corresponde con el escalonado de la función de transferencia real, frente a la ideal. Podemos verlo en esta figura: Como vemos, cada valor digital tiene un error de cuantificación de +- ½ LSB (Bit menos significativo). Por tanto, cada código digital representa un valor que puede estar dentro del ½ LSB a partir del punto medio entre valores digitales continuos.
Si consideramos un error que no afecte a la precisión total de la conversión, ( por lo que habrá de ser menor que ½ LSB) la frecuencia máxima de muestreo deberá ser:
En esta fórmula Ta es el tiempo de apertura del circuito de muestreo y retención, o bien el tiempo total de conversión si el anterior no existe, y n el nº de bits del convertidor.
El circuito de muestreo y retención puede estar a veces integrado dentro de la misma cápsula del convertidor, lo que nos puede simplificar el diseño enormemente.
Tipos de circuitos integrados que existen en el mercado
Actualmente existen microcontroladores con convertidores CAD integrados, la mayoría de ellos de 10 bits, el estudio de estos circuitos se verá en la UAP de 4º semestre de la Lic. Ingeniería en Informática de Adquisición de datos.
Algunos circuitos que podemos adquirir son:
Existe una gran variedad de ADCs que están disponibles en el mercado de varios fabricantes de ICs con un amplio rango de características de operación y ventajas.
Ejemplo 18.-Para darnos una idea de cómo son utilizados actualmente en sistemas de aplicación, veremos uno de los dispositivos más populares que es el ADC0804, el cual es un IC CMOS de 20 pines que realiza la conversión A/D usando el método de aproximaciones sucesivas
Algunas de sus características más importantes son las siguientes (tomadas del libro de Sistemas Digitales, Tomas Floyd, Pág.627):
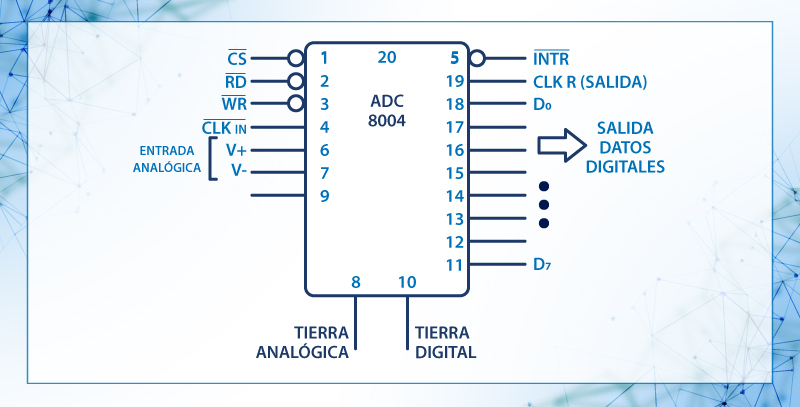
Figura 101. Diagrama esquemático ADC 8004