


Inicio Unidad I Unidad II Unidad III Unidad IV Unidad V Bibliografía

En la actualidad existen circuitos que se pueden programar para obtener funciones digitales diversas mediante un proceso de programación, llamados PLD (Programmable Array Logic), el uso de estos PLD, permite reducir considerablemente el número de circuitos requeridos para implementar una función lógica.
Existen en el mercado varios tipos de PLD como son:
Una característica relevante de los sistemas digitales es su capacidad de almacenar una gran cantidad de datos en forma temporal o permanente, esto permite realizar las operaciones que se realizan por ejemplo en las computadoras, entre otras aplicaciones diversas.
Memorias ROM o memorias de sólo lectura.
Estas memorias ROM son de diferentes tipos los, que se diferencian por la forma de ser programados y borrados:
A medida que aumenta la facilidad de borrado y programación aumenta el costo y tiempo de acceso a los datos, pudiendo ser esto una característica para la decisión de la selección para su aplicación .
Investiga los campos de aplicación de las memorias ROM en sus diversos tipos
Memoria RAM
El acrónimo RAM significa acceso aleatorio, es decir cualquier posición de memoria es tan accesible como otra, esta memoria tiene la ventaja de ser de gran capacidad y consumir menor energía que una memoria ROM, pero no es de almacenamiento permanente, esto significa que al quitarse la alimentación eléctrica se pierde la información.
Es muy usada en sistemas de cómputo para almacenamiento temporal de programas y datos.
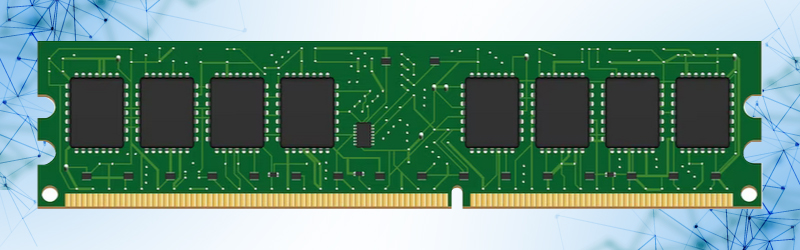
Figura 76. Memoria RAM
Memoria RAM estática (SRAM).
Esta memoria está construida en esencia a base de Flip-flops con tecnología CMOS de tipo BiCMOS y NMOS, la primera a base de transistores y la segunda con MOSFET
Ambas tecnologías han evolucionado considerablemente, en la actualidad se tienen memorias de gran capacidad y velocidad, este tipo de memoria es capaz de almacenar los datos indefinidamente hasta que se pierda la energía de alimentación.
Memoria RAM dinámica (DRAM)
Las memorias DRAM son construidas en base a pequeños capacitores para almacenar la información ,1 y 0 cargado o no el capacitor, son de una gran capacidad de almacenamiento y poco consumo de energía, pero tiene la desventaja que los capacitores tienden a descargarse, por lo que requieren circuitos de recarga o también llamados de refresco de datos. Pero son usadas preferentemente cuando se requiere menor costo y menor potencia.
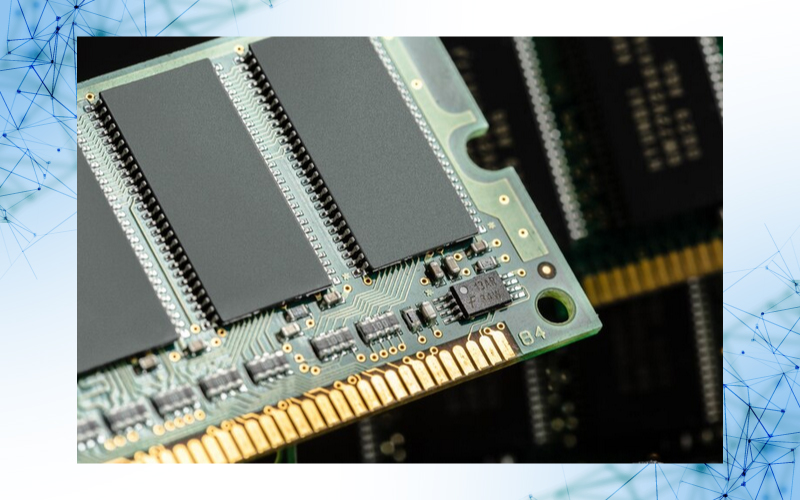
Figura 77. Memoria RAM estática
Ejemplo 9.-Describe memoria DRAM y SRAM para laptop
Estos dos tipos de memorias son como ya se dijo, de acceso aleatorio, se utilizan en la memoria de las computadoras y laptops, en ellas se guardan los datos que se están operando, ya sea para almacenar temporalmente o para tener los datos en forma inmediata para hacer operaciones que se puedan realizar en forma inmediata por la CPU.
Ambas tienen ventajas y desventajas, la SRAM son memorias más rápidas que las DRAM pero tienen menor capacidad de almacenamiento, se usan preferentemente en memorias tipo caché. Las memorias DRAM son de mayor capacidad y menor costo, se utilizan como memoria principal.
La DRAM se diseñó para superar las desventajas de la SDRAM; se redujo su costo y aumentó la capacidad de almacenamiento, pero es más lenta y de mayor consumo de energía.
Investiga cuales son las memorias empleadas en las computadoras tipo Laptop; Marcas, su nomenclatura, su capacidad y costos.
El diseño con PLD’s tiene las siguientes ventajas en relación a la lógica cableada:
Los circuitos programables PLD, (Programable Array Device), son todos los dispositivos programables, de acuerdo a sus características se dividen en ROM, PLA y GAL, en el apartado anterior se trataron los tipos de ROM, en seguida veremos los PLA y GAL
Circuitos PLA
(PLA, Programmable Logic Array)
El PLA es un PLD formado por una matriz AND programable y una matriz OR programable. La PLA ha sido desarrollada para superar algunas de las limitaciones de las memorias PROM. Tienen ambos planos programables, esto hace que su costo se eleve y sea su desventaja.
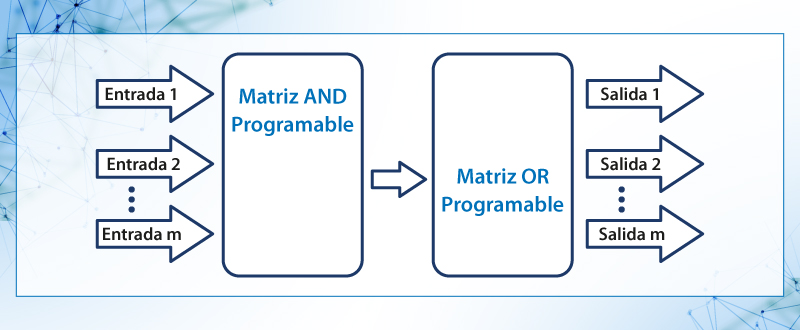
Figura 78. Diagrama de circuito programable PLA
Estos dispositivos contienen ambos términos AND y OR programables lo que permite a cualquier término AND alimentar cualquier término OR. Las PAL probablemente tienen la mayor flexibilidad frente a otros dispositivos con respecto a la lógica funcional. Normalmente poseen realimentación desde la matriz OR hacia la matriz AND que puede usarse para implementar máquinas de estado asíncronas.
La mayoría de las máquinas de estado, sin embargo, se implementan como máquinas síncronas. Con esta perspectiva, los fabricantes crearon un tipo de PLA denominado Secuencial (Sequencer) que posee registros de realimentación desde la salida de la matriz OR hacia la matriz AND.
¿Qué es?
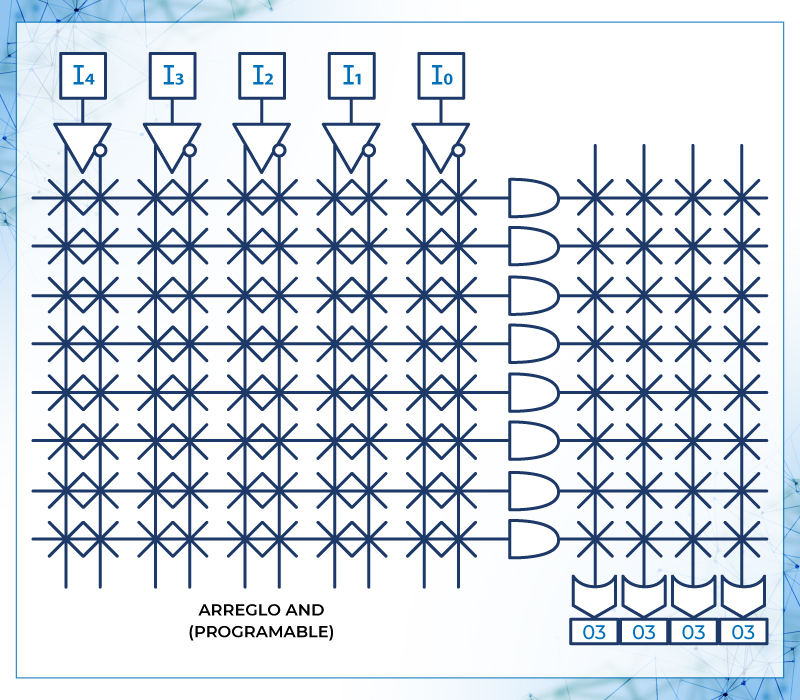
Figura 79. Diagrama esquemático de un CI PLD programable
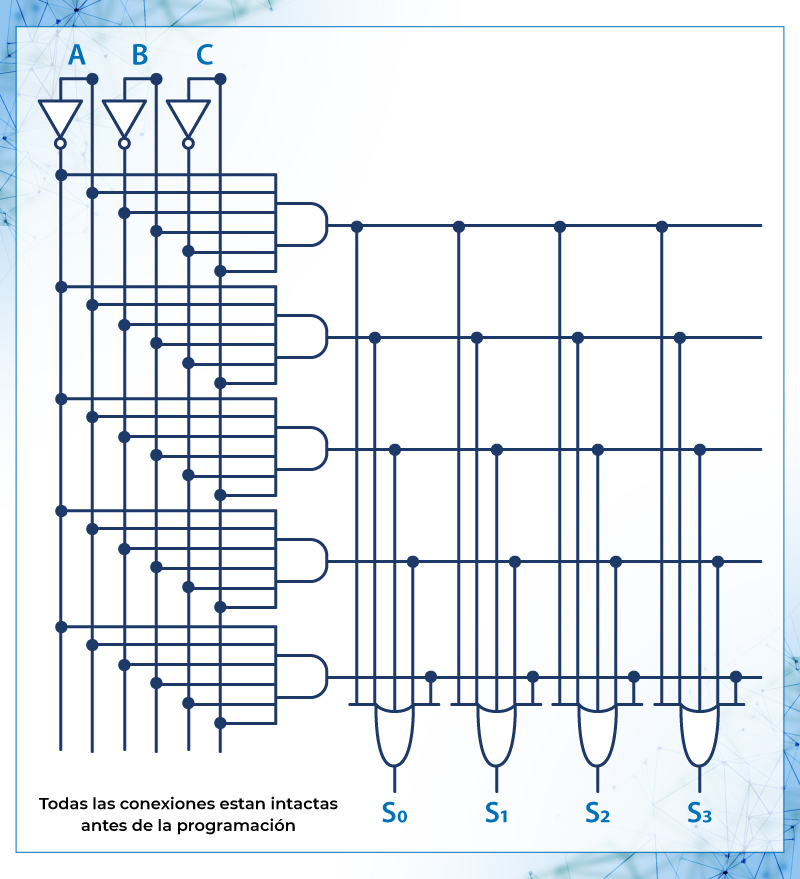
Figura 80. PLA 3x4 con 5 términos producto
Ejemplo 10.-Reduce a la mínima expresión los minitérminos y muestra el esquema de la PAL programada.
Solución
Ecuaciones
X= AC+B’
Y= ABC
Z= A’C+AC’
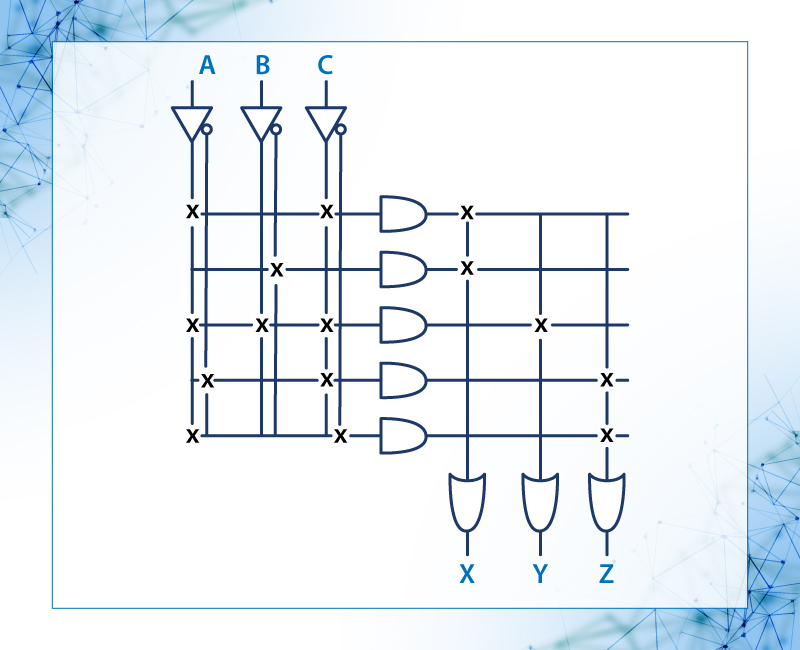
Figura 81. Esquema de la PLA programada
GAL
Otro tipo de PLD son las GAL
Las GAL son dispositivos de matriz lógica genérica. Esto tiene entradas AND programables, una matriz OR fija y una salida lógica programable. Están diseñados para emular muchas PAL.
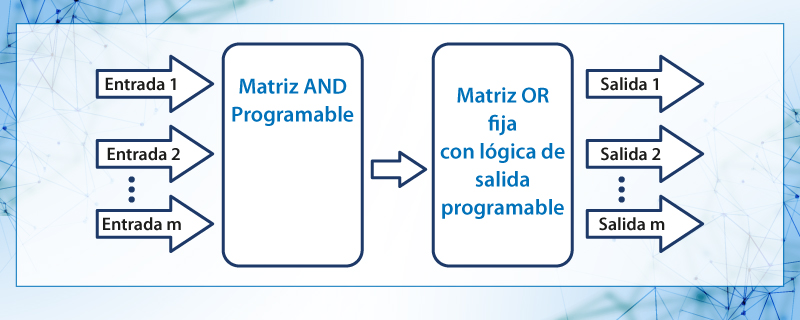
Figura 82. Diagrama de circuito programable PLA
Método de programación de dispositivos.
Cabe mencionar que no es propósito de esta unidad el mostrar cómo se programan los PLD, ya que esto se hace en la UAP de Dispositivos Programables
Pero sí señalaremos lo siguiente:
El proceso de diseño lógico con PLD’s se resume en tres grandes etapas:
Diseño lógico
Dentro de la primera etapa, los pasos involucrados son los mismos que en cualquier diseño digital, combinatorio o secuencial, y se pueden subdividir en los pasos siguientes:
Implementación
La implementación del diseño consiste en seleccionar y usar las herramientas, tanto de hardware y software, necesarias para la traducción de los resultados a un mapa de fusibles para la programación del chip. Esta fase consiste en:
Verificación
La etapa final consiste en la verificación del diseño en la cual la correcta programación del PLD es comprobada, por medio de técnicas de simulación
Los pasos de la verificación son:
Ejemplo 11.-Ejemplo de circuito GAL que existen en el mercado
El GAL es un tipo de circuito integrado de marca registrada por Laticce Semiconductor diseñada para sustituir a la mayoría de las PAL, teniendo compatibilidad con sus terminales.
Entre los principales fabricantes están: Laticce, Philips, Texas Instruments, entre otros.
En la página web http://pdf1.alldatasheet.com/datasheet-pdf/view/70208/LATTICE/GAL22V10D-10LJ.html se pueden observar las características del a GAL 22V10, que es un circuito que permite 22 entradas y 10 salidas.
Muestra tres ejemplos de PLA y tres ejemplos de GAL comerciales, señalando su capacidad y costo.
Programador universal
Para programar los PLA o GAL se usa un dispositivo llamado programador de PLD, el cual se alimenta con un programa . jedec que se genera a través de un lenguajes de programación de PLD s especifico, como OPAL ( Open Programable Architecture Languajes), Lenguaje Abierto de Arquitecturas Programables
En este lenguaje, se ofrece al diseñador usar lenguaje de máquinas de estado, ecuaciones booleanas multi-nivel, así como funciones de tabla de verdad, etc. Esto le proporciona libertad para seleccionar la implementación que mejor se adapte a las especificaciones del diseño.
Como ya se mencionó no es propósito de esta unidad el mostrar cómo se programan los PLD, ya que esto se hace en la UAP de Dispositivos Programables
Solamente se muestra un ejemplo de aplicación resuelto con un lenguaje OPAL.
Ejemplo 12.-Diseña un convertidor de un número binario de 4 bits a una salida ASCII de 7 bits utilizando tablas de verdad, mostrando solamente el implementar un vector de prueba en un dispositivo PAL16L8.
Solución
El listado a cargar en el editor del OPAL es:
BEGIN HEADER
Este es un convertidor de 4 bits a una salida en c¢digo ASCII de 7 bits,
utilizando tablas de verdad.
END HEADER
BEGIN DEFINITION
DEVICE p16l8;
INPUTS w=1,x=2,y=3,z=4;
OUTPUTS (COM) /a6=12,/a5=13,/a4=14,/a3=15,/a2=16,/a1=17,/a0=18;
END DEFINITION
BEGIN TRUTH_TABLE
TTIN w,x,y,z;
TTOUT /a6,/a5,/a4,/a3,/a2,/a1,/a0;
0000 0110000
0001 0110001
0010 0110010
0011 0110011
0100 0110100
0101 0110101
0110 0110110
0111 0110111
1000 0111000
1001 0111001
1010 1000001
1011 1000010
1100 1000011
1101 1000100
1110 1000101
1111 1000110
END TRUTH_TABLE
BEGIN VECTOR
w,x,y,z,/a6,/a5,/a4,/a3,/a2,/a1,/a0;
0000 LHHLLLL
0001 LHHLLLH
0010 LHHLLHL
0011 LHHLLHH
0100 LHHLHLL
0101 LHHLHLH
0110 LHHLHHL
0111 LHHLHHH
1000 LHHHLLL
1001 LHHHLLH
1010 HLLLLLH
1011 HLLLLHL
1100 HLLLLHH
1101 HLLLHLL
1110 HLLLHLH
1111 HLLLHHL
END VECTOR



